CNN
In this post, we will go through basics of CNN using MNIST dataset. We will implement this using two popular deep learning frameworks Keras and PyTorch.
All the codes implemented in Jupyter notebook in Keras, PyTorch, Tensorflow and fastai.
All codes can be run on Google Colab (link provided in notebook).
Hey yo, but what is CNN?
Well sit tight and buckle up. I will go through everything in-detail.
Feel free to jump anywhere,
- Overfitting and Underfitting
- Introduction to CNN
- Recap
- Keras
- PyTorch
- Further Reading
- Footnotes and Credits
# load all the required libraries
import numpy as np # package for computing
from sklearn.model_selection import train_test_split # split dataset
import keras # import keras with tensorflow as backend
from keras.datasets import mnist # import mnist dataset from keras
from keras.models import Model, Sequential # sequential and functional api keras
from keras.layers import Dense, Input, Conv2D
from keras.layers import Dropout, Flatten, MaxPooling2D # dense and input layer for constructing mlp
import matplotlib.pyplot as plt # matplotlib library for plotting
# display plots inline (in notebook itself)
%matplotlib inline
Using TensorFlow backend.
# load mnist data
# the data, split between train and validation sets
(train_x, train_y), (test_x, test_y) = mnist.load_data()
# #orginally shape (60000, 28, 28) for train and (10000, 28, 28) for test
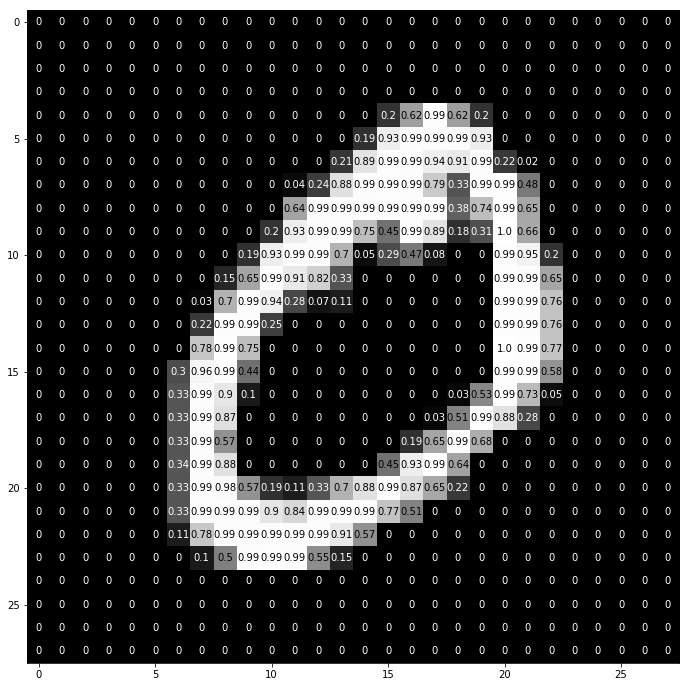
# As image is grayscale it has values from [0-255] which we will visualize below
# convert dtype to float32 and scale the data from [0-255] to [0-1]
train_x = train_x.astype('float32')
test_x = test_x.astype('float32')
train_x /= 255
test_x /= 255
print('Training samples and shape:', train_x.shape[0], train_x.shape)
print('Test samples and shape:', test_x.shape[0], test_x.shape)
Training samples and shape: 60000 (60000, 28, 28)
Test samples and shape: 10000 (10000, 28, 28)
From the previous post, we learned how to split dev and test data. Here, we keep the dimensions of the data same.
# we will split val into --> 20% val set and 80% test set
# stratify ensures the distribution of classes is same in both the sets
val_x, test_x, val_y, test_y = train_test_split(test_x, test_y, test_size=0.8, stratify=test_y)
print ('Validation samples and shape', val_x.shape[0], val_x.shape)
print ('Test samples and shape', test_x.shape[0], test_x.shape)
Validation samples and shape 2000 (2000, 28, 28)
Test samples and shape 8000 (8000, 28, 28)
Visualization of data
Enough talk, show me the data!
# plot the images in the batch, along with the corresponding labels
fig = plt.figure(figsize=(25, 4))
for idx in np.arange(20):
ax = fig.add_subplot(2, 20/2, idx+1, xticks=[], yticks=[])
ax.imshow(train_x[idx], cmap='gray')
# print out the correct label for each image
ax.set_title(str(train_y[idx]))

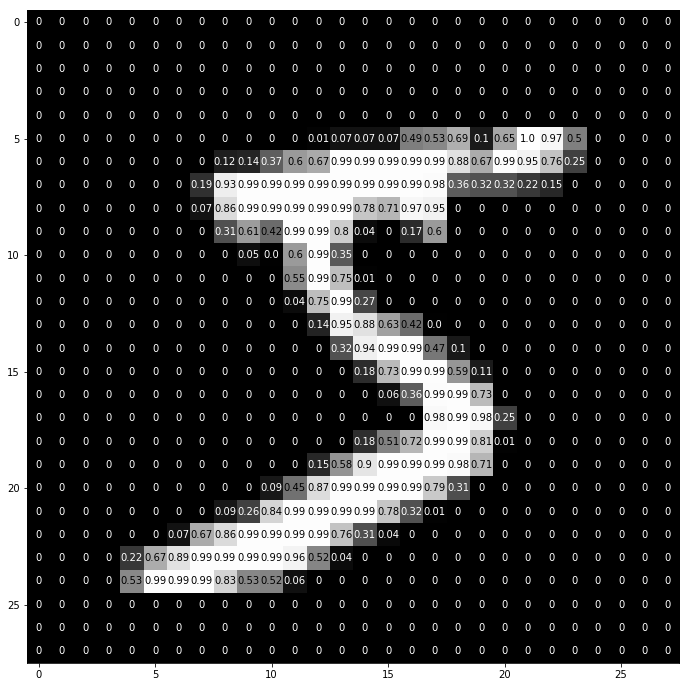
img = train_x[1]
fig = plt.figure(figsize = (12,12))
ax = fig.add_subplot(111)
ax.imshow(img, cmap='gray')
width, height = img.shape
thresh = img.max()/2.5
for x in range(width):
for y in range(height):
val = round(img[x][y],2) if img[x][y] !=0 else 0
ax.annotate(str(val), xy=(y,x),
horizontalalignment='center',
verticalalignment='center',
class='white' if img[x][y]<thresh else 'black')
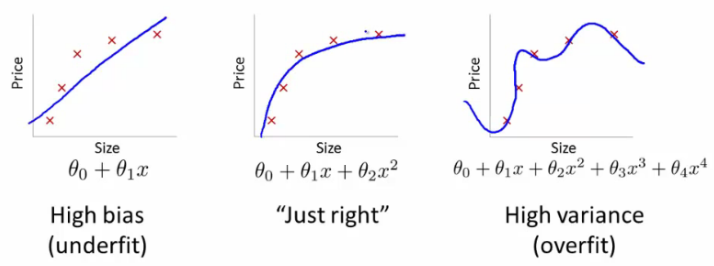
Overfitting and Underfitting
Suppose your training, dev and test sets all come from the same distribution. Then you should always try to get more training data, since that can only improve performance, right?
Even though having more data can’t hurt, unfortunately it doesn’t always help.
Before understanding overfitting and underfitting, let’s dive into bias and variance. There are two major sources of error in machine learning: bias and variance. Understanding them will help you decide whether adding data, as well as other tactics to improve performance are a good use of time.
Cat Classifier
Back to cats, suppose we want to build a cat classifier that has 5% error rate. Training error is at 15% and dev set error is at 16%. In this case, adding more data will make training harder for algorithm to do well on training set.
If we have error rate of 15% (or 85% accuracy) on training set, but target error rate is 5% (or 95% accuracy), then the first problem to solve is to improve algorithm’s performance on training set.
Suppose as above that algorithm has 16% error (84% accuracy) on the dev set. We break the 16% error into two components:
- First, the algorithm’s error rate on the training set. In this example, it is 15%. We think of this as the algorithm’s bias.
- Second, how much worse the algorithm does on the dev (or test) set than the training set. In this example, it does 1% worse on the dev set than the training set. We think of this as the algorithm’s variance.
| Training | Dev | Bias(=Training error) | Variance(=Dev-Training) | Known as | Also Known as |
|---|---|---|---|---|---|
| 1% | 15% | 1% | 14% | High variance | Overfitting |
| 15% | 16% | 15% | 1% | High bias | Underfitting |
We estimate the bias as 15%, and variance as 15%. This classifier has high bias and high variance : It is doing poorly on the training set, and therefore has high bias, and its performance on the dev set is even worse, so it also has high variance.
Optimal Rate: The “ideal” error rate—that is, one achievable by an “optimal” classifier—is nearly 0% not always. Also known as Unavoidable bias or Bayes error rate.
Suppose that we are building a speech recognition system, and find that 14% of the audio clips have so much background noise or are so unintelligible that even a human cannot recognize what was said. In this case, even the most “optimal” speech recognition system might have error around 14%.
Suppose,
- Training error = 15% and Dev error = 30%, if optimal error = 14%
The training set performance is already close to the optimal error rate of 14%. Thus, there is not much room for improvement in terms of bias or in terms of training set performance. However, this algorithm is not generalizing well to the dev set; thus there is ample room for improvement in the errors due to variance.
- Training error = 15% and dev error = 30%, if optimal error = 0%
A training error of 15% leaves much room for improvement. This suggests bias-reducing changes might be fruitful.
Avoidable bias: Difference between training error and optimal rate error rate. The “avoidable bias” reflects how much worse your algorithm performs on the training set than the “optimal classifier.”
Lessons:
- dev/test set performance is usually worse than your training set performance
- Addressing bias improves its performance on the training set
- Addressing variance help algorithm to generalize better from the training set to dev/test set.
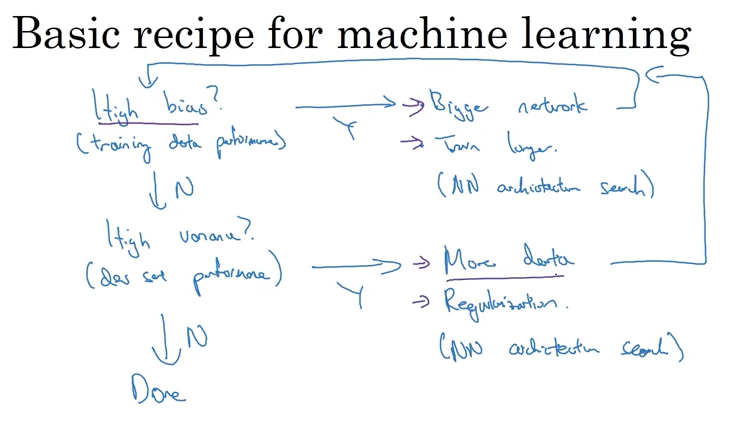
Too many terminologies introduced, lets walk through them :
- (Training - Dev) error high –> High variance –> Overfitting –> Add more data to training set
- Training error high –> High bias –> Underfitting –> Make model more complex
- Bayes error –> Optimal Rate –> Unavoidable bias
- (Training - Bayes) error –> Avoidable bias
- Total Bias = Optimal error rate (“unavoidable bias”) + Avoidable bias
In next post, we will go into plotting learning curves, how to interpret them and ways to tackle. Stay tuned!
Introduction to CNN
CNN is convolution neural networks. What is convolution? I will explain it further and we know quite a bit about neural networks from our previous post on MLP. We have seen the dataset, which consist of [0-9] numbers and images of size 28 x 28 pixels of values in range [0-1] .
A long time ago in a galaxy far, far away….

I-know-everything: Hello, Young Padwan. As promised we will today look into Force of CNN . Convolutional Neural Networks are very similar to ordinary Neural Networks from the previous post: they are made up of neurons that have learnable weights and biases. Each neuron receives some inputs, performs a dot product and optionally follows it with a non-linearity. The whole network still has a single differentiable score function: from the raw image pixels on one end to class scores at the other. And they still have a loss function (e.g. SVM/Softmax) (or error function) on the last (fully-connected) layer. So what changes? ConvNet architectures make the explicit assumption that the inputs are images, which allows us to encode certain properties into the architecture. These then make the forward function more efficient to implement and vastly reduce the amount of parameters in the network.
Here, first let me tell you about convolution operation and how it works.
We apply various filter to original Taj Mahal image and see the results.

Edge Detect
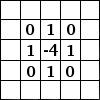

Blur
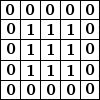

Sharpen
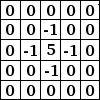
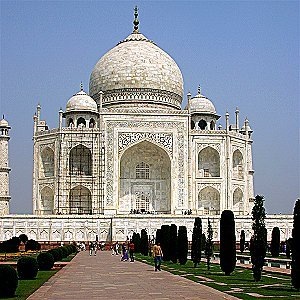
So, above examples show how convolution operator works for edge detection, blurring or sharpening the image depending on different kernel values.
Want to play more, have a look at this amazing post on setosa.io blog.
I-know-nothing: Master, How does convolution operation help us in ConvNet?
I-know-everything: Okay, ConvNets take advantage of the fact that input consists of images. The layers of a ConvNet have neurons arranged in 3 dimensions: width, height, depth (or channels). (the word depth here refers to the third dimension of an activation volume, not to the depth of a full Neural Network, which can refer to the total number of layers in a network.) For example, consider our example of MNIST where each input is of dimension 28 x 28 x 1 (width, height, depth respectively) or CIFAR-10 (another toy dataset with 10 classes of different categories), the volume has dimensions 32x32x3 (width, height, depth respectively).
Suppose we apply filter of dimension (5x5x3) to above example of CIFAR-10 with input dimension (32x32x3), it results in output dimesion of (28x28x3) much smaller image than input. Hence, reduction in number of pixels than input.
Simpler way to calculate output dimesion O, given input dimension W and convolution filters kernel size F, padding P, and stride size S.
O = (W + 2P - F)/S + 1
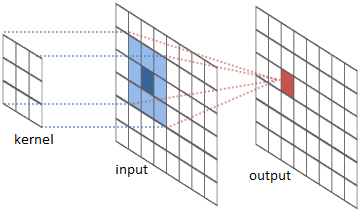
Now you might ask what’s kernel, padding and stride in convolution filters?
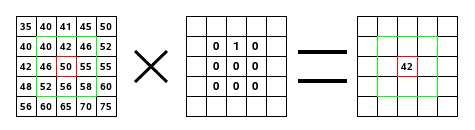
Kernel
The size of kernel(F) used for convolution on input to the filter. For e.g. 5x5, 3x3 or 7x7 are popular kernel sizes. It implements element-wise computation across input matrix and outputs the sum. Kernel usually has a size that is much smaller than the original input so that we can take advantage of decrease in memory.
Consider example,
Strides
When the stride(S) is 1 then we move the filters one pixel at a time. When the stride is 2 (or uncommonly 3 or more, though this is rare in practice) then the filters jump 2 pixels at a time as we slide them around. This will produce smaller output volumes spatially.
Consider example,
Padding
Both kernel and stride function as dimension reduction technic. So for each convolution layer, the output dimension will always be smaller than input. However if we want to build a deep convolution network, we don’t want the input size to shrink too fast. A small kernel can partly solve this problem. But in order to maintain certain dimension we need zero padding. The nice feature of zero padding(P) is that it will allow us to control the spatial size of the output volumes. Basically it is adding zero border to your input.
Consider example,
So, basically a single convolution filter on input consists of these components. We can stack many such conv filters if input size is 3 dimensional.
Consider example,
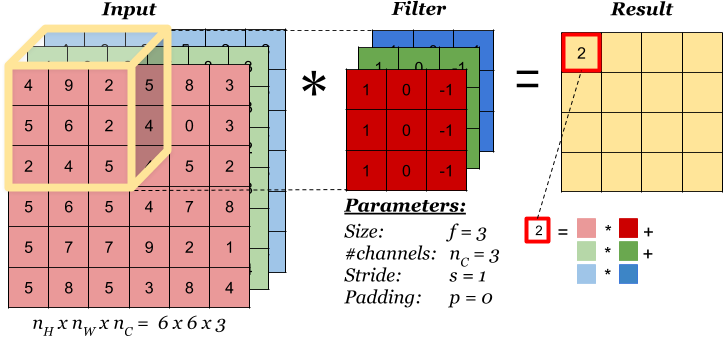
Here, input -> (6x6x3), conv filter (F) -> (3x3x3), number of conv filters -> 1, padding (P) -> 0, strides (S) -> 1
Note: Always remember that depth (number of channels) of input and conv filter have to be same.
Applying our formula for calculating output dimension: O = (6 + (2 * 0) - 3)/1 + 1 = 4
Output dimension = (4 x 4 x number of conv filters) = (4 x 4 x 1)
Consider an example of number of conv filters -> 2, all other parameters are same
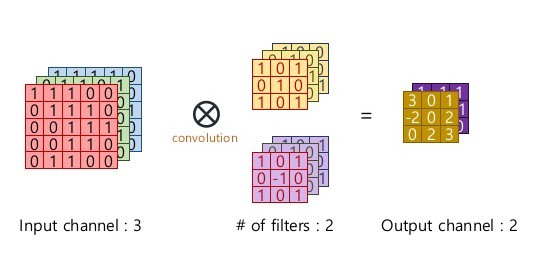
Applying our formula for calculating output dimension: O = (6 + (2 * 0) - 3)/1 + 1 = 4
Output dimension = (4 x 4 x number of conv filters) = (4 x 4 x 2)
For further in-depth explaination with cool figure and animations can be found here.
Here is cool demo of how convolution filters apply to input. Conv-demo
So, now we have full understanding about what convolution filters are in ConvNets and different components of convolution filters.
I-know-nothing: Master, does ConvNet consists only of convolution filters?
I-know-everything: Excellent, this is where I was headed next. So, ConvNets architecture consists of following distinct layers -> [INPUT - CONV - RELU - POOL - FC].
We have seen INPUT, CONV, RELU and FC layer in this and previous post. We will look into POOL layer.
POOLING
Pooling functions as a dimension reduction technic. It is also referred to as a downsampling layer. But unlike kernel which reduces all dimensions, pooling keep channel dimension untouched. This reduces the size of the feature maps thus reducing the number of nodes in the future layers which improve efficiency of the model. Basically, pooling outputs a certain statistics for a certain among of input. This introduces a feature stronger than Equivariant representation — Invariant representation. In short, it is used to detect the object regardless of where the object is placed. For e.g., we want our network to output label 2, even if input example of 2 is in far right corner or bottom left corner. There are many types of pooling layer, Max-pooling, Average-pooling, GlobalMaxPooling, GlobalAveragePooling.
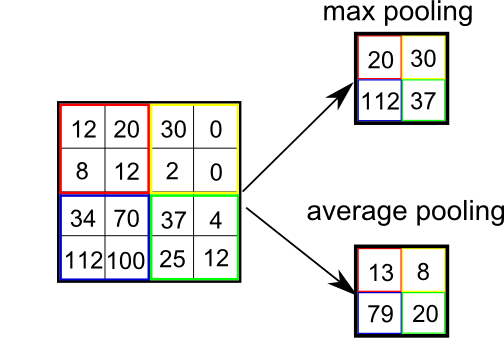
Consider example,
Now, you have full understanding of different layers used in ConvNet and their different components.
I-know-nothing: Master, ConvNets consists of applying [CONV - RELU - POOL] operation repeatedly, when are using FC layer?
I-know-everything: Absolutely, the most common ConvNet architecture follows the pattern: INPUT -> [[CONV -> RELU]N -> POOL?]M -> [FC -> RELU]*K -> FC , where the * indicates repetition, and the POOL? indicates an optional pooling layer.
This can be illustrated in the example below.
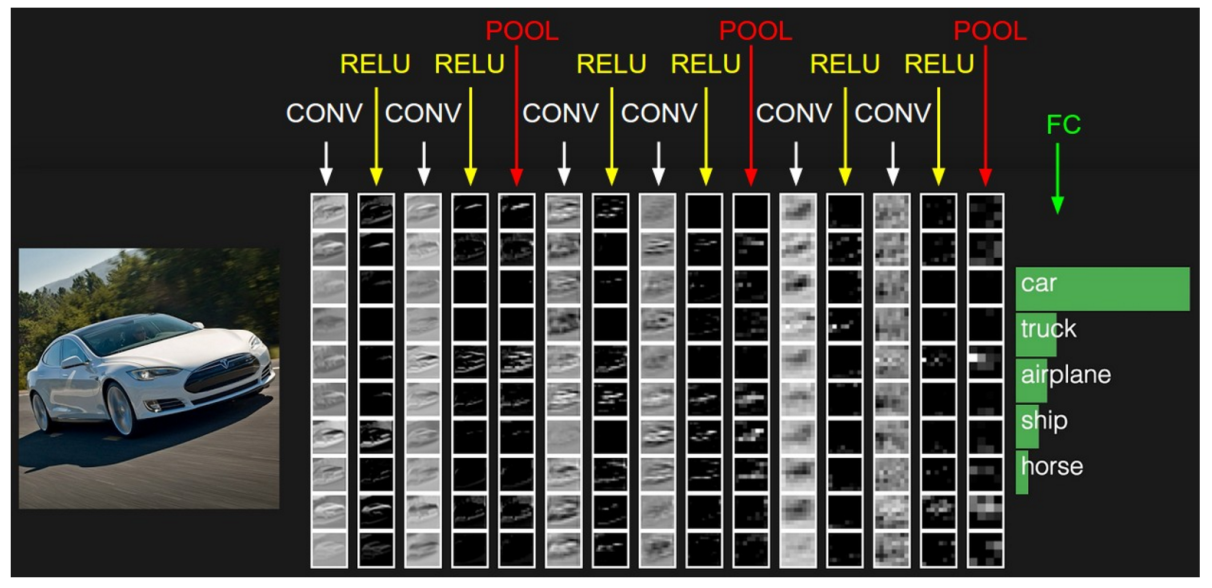
Deep ConvNet consists of repetition of [CONV - RELU - POOL] layers and once sufficient depth is introduced, then we flatten the output of above and connect it with fully connected layer. This fully connected layer is connect with another fully connect layer to predict desired number of classes.
Consider example,
I-know-nothing: Now I understand what is happening in convolution layers and how a typical ConvNet architecture is. How does training ConvNets work? Does it still consist of forward pass and backward pass? What is the loss function or error function? Does it still use jar jar backpropagation for passing error?
I-know-everything: Those are some excellent question. So, now having explained what ConvNet architectures are we have a model just like one in MLP, we input image to that model, and the model outputs the class the input image belongs to. Training ConvNets is similar, we have a loss function just like in MLP, we use softmax layer to output the probabilities of input belonging to particular class. We do a forward propogation of passing input to ConvNets to calculate the error between output \(\mathbf{y}\) and target \(\mathbf{\hat{y}}\) and backpropogate the error from [FC - POOL - RELU - CONV - INPUT].
Note: To see, how jar jar backpropagation works in ConvNets, have a look here.
This is how a typical training ConvNets looks like.
Story
Now let me digress a bit and take you back to story of where convnets got their insipiration from. The work by Hubel and Wiesel in 1950s and 1960s showed that cat(yup, cats and cats everywhere) and monkey visual cortexes contain neurons that individually respond to small regions of the visual field. Provided the eyes are not moving, the region of visual space within which visual stimuli affect the firing of a single neuron is known as its receptive field.
In 1957, Mark I Perceptron by Frank Rosenblatt was the first implementation of the perceptron algorithm. Back then, Frank Rosenblatt used step function as activation function and as we know that step function is non-differentiable, the alogrithm did not learn effectively. There was no concept of backpropagation back then. In 1960s, Widrow and Hoff stacked these perceptrons into multi-layer network still no backpropagation. In 1980, Fukushima proposed neocognitron, a hierarchical, multi-layered artificial neural network which was used for handwritten character recognition and other pattern recognition tasks, and served as the inspiration for convolutional neural networks. Next boost came in around 1986, there was this influential paper that basically is the first time we see backpropagation like rules in seminal paper by Rumelhart, Hinton and Williams, when they were playing with mulit-layer perceptron. The only problem was the deep layer network were not very scalable, training would get stuck and backprop was not working well for these very deep networks.
In the year 1994, one of the very first convolutional neural networks, and what propelled the field of Deep Learning. This pioneering work by Master Yann LeCun was named LeNet5 after many previous successful iterations since they year 1988. In the years from 1998 to 2010 neural network were in incubation. Most people did not notice their increasing power, while many other researchers slowly progressed. In 2010, Dan Claudiu Ciresan and Jurgen Schmidhuber published one of the very fist implementations of GPU Neural nets. This implementation had both forward and backward implemented on a a NVIDIA GTX 280 graphic processor of an up to 9 layers neural network.
In 2006, again Hinton’s paper, reinvigorated research in deep learning and used Restricted Boltzmann machines(RBM) and showed how many layered neural networks can be trained using backpropagation from scratch if the weights are initialized in a clever way rather than randomly. In 2010s paper, there were really big results where neural network really worked very well than Kernels, SVMs and so on. specifically in the area of speech recognition, the neural network gave them huge improvement when swapped with HMM (Hidden Markov Models) and GMMs (Gaussian Mixture Models). This was the first time neural networks gave a large improvement indicating that neural networks work.
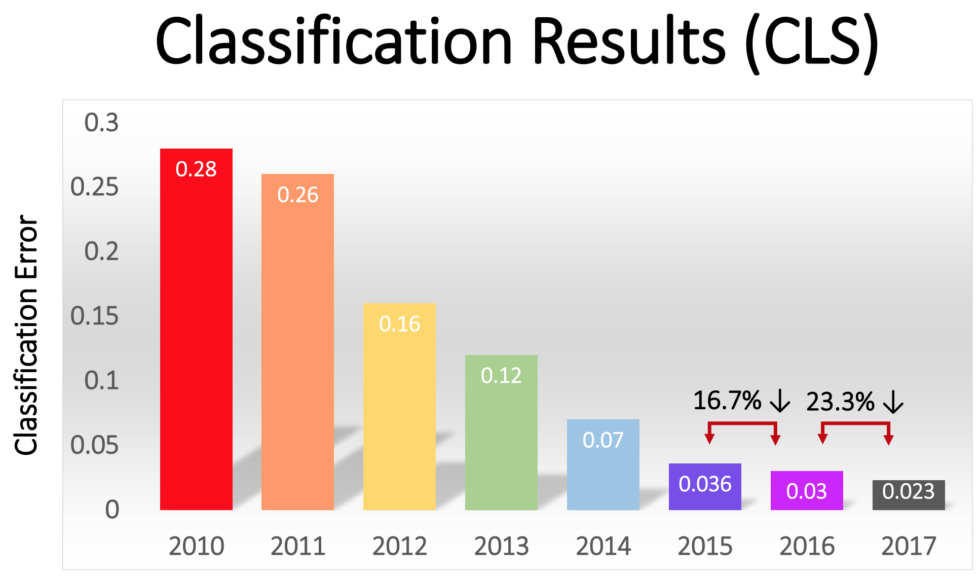
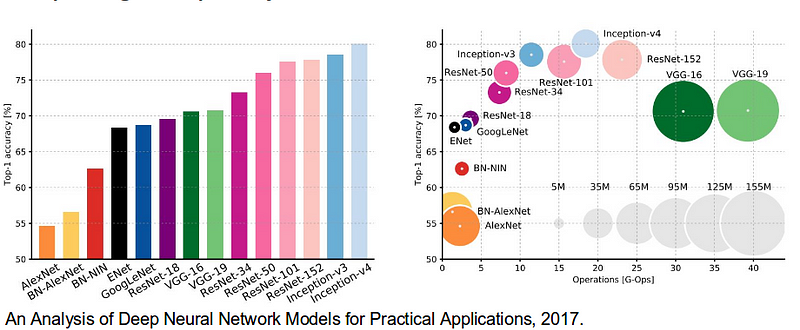
In 2012, seminal paper by Alex Krizhevsky and Ilya Sutskever with Geoffrey Hinton (again) proposed AlexNet architecture which was used to classify 1000 categories and 1.2 million images in a seminal competition organized by Stanford AI group called ImageNet with efforts from Fe-Fe-Li, many graduate students and Mechanical Turk. AlexNet contained eight layers; the first five were convolutional layers, some of them followed by max-pooling layers, and the last three were fully connected layers. It used the non-saturating ReLU activation function which showed improved training performance over tanh and sigmoid. The network achieved a top-5 error of 15.3% more than 10.8% points lower than that of the runner up. AlexNet significantly outperformed all the prior competitors and won the challenge by reducing the top-5 error from 26% to 15.3%. Suddenly people started to pay attention not just within the AI community but across the technology industry as a whole. This result change course of community and this competition and result sky-rocketed in very cool architectures eventually surpassing human performance at classifying 1.2 million images into 1000 categories.
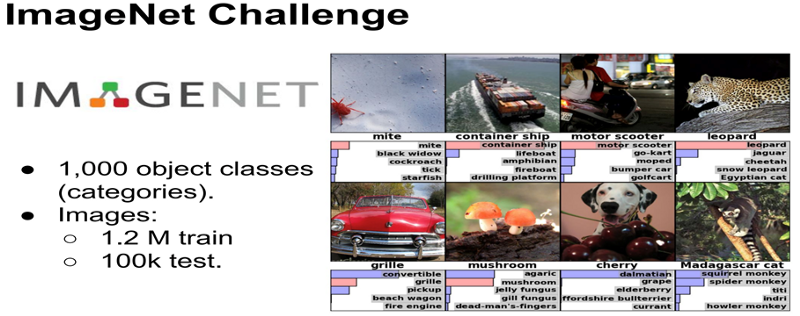
Read more about both paper and competition: here and here.
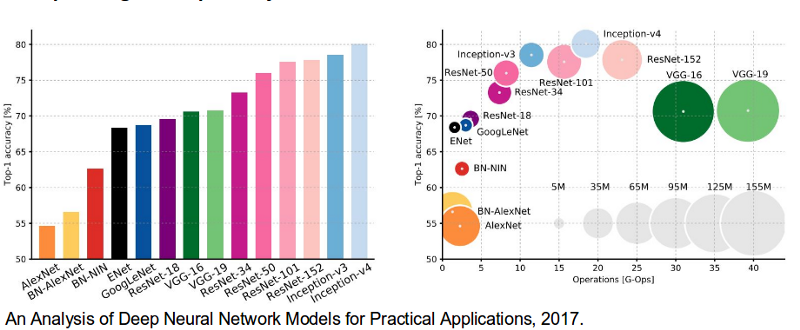
Here is the illustration showing the error rate from year 2010 to 2017.
We will discuss some of the state of the art architectures.
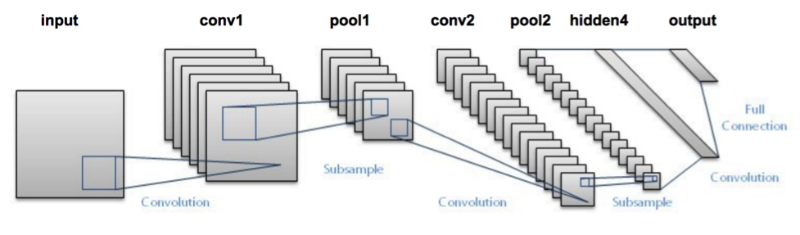
- LeNet
LeNet-5, a pioneering 7-level convolutional network by LeCun et al in 1998. Of these, the best known is the LeNet architecture that was used to read zip codes, digits, etc.
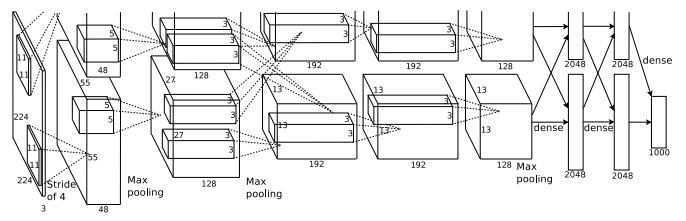
- AlexNet
AlexNet contained eight layers; the first five were convolutional layers, some of them followed by max-pooling layers, and the last three were fully connected layers. It used the non-saturating ReLU activation function, which showed improved training performance over tanh and sigmoid. AlexNet was trained for 6 days simultaneously on two Nvidia Geforce GTX 580 GPUs which is the reason for why their network is split into two pipelines.
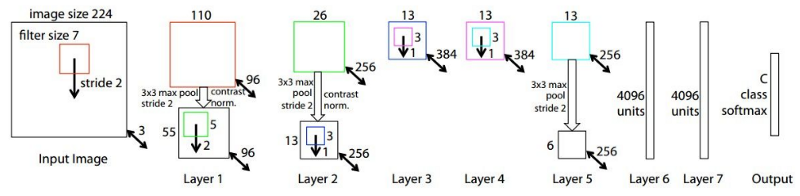
- ZFNet
It achieved a top-5 error rate of 14.8% which is now already half of the prior mentioned non-neural error rate. It was mostly an achievement by tweaking the hyper-parameters of AlexNet while maintaining the same structure. The ILSVRC 2013 winner was a Convolutional Network from Matthew Zeiler and Rob Fergus.
- VGG
VGGNet by Oxford’s renowned Visual Geometry Group consists of 16 convolutional layers and is very appealing because of its very uniform architecture. Similar to AlexNet, only 3x3 convolutions, but lots of filters. Trained on 4 GPUs for 2–3 weeks. It is currently the most preferred choice in the community for extracting features from images.

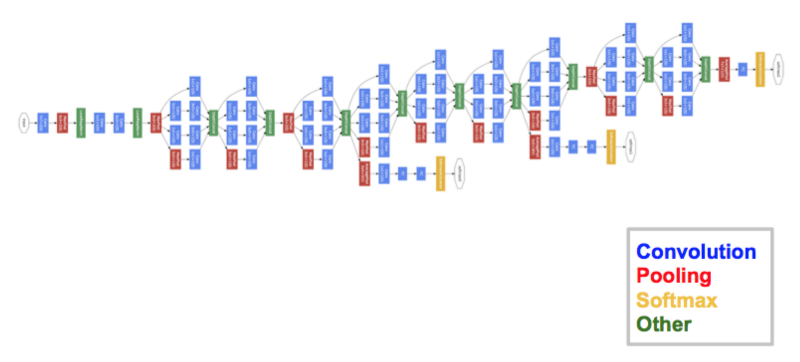
- GoogLeNet (Inception v1)
The network used a CNN inspired by LeNet but implemented a novel element which is dubbed an inception module. It used batch normalization, image distortions and RMSprop. This module is based on several very small convolutions in order to drastically reduce the number of parameters. Their architecture consisted of a 22 layer deep CNN but reduced the number of parameters from 60 million (AlexNet) to 4 million. It achieved a top-5 error rate of 6.67%. The winner of the ILSVRC 2014 competition was GoogleNet(a.k.a. Inception V1) from Google.
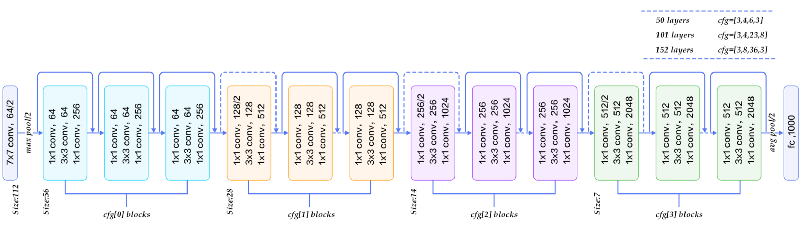
- ResNet
At the ILSVRC 2015, the so-called Residual Neural Network (ResNet) by Kaiming He et al at Microsoft Asia Research Group introduced a novel architecture with “skip connections” and features heavy batch normalization. Such skip connections are also known as gated units or gated recurrent units and have a strong similarity to recent successful elements applied in RNNs. Thanks to this technique they were able to train a NN with 152 layers while still having lower complexity than VGGNet. It achieves a top-5 error rate of 3.57% which beats human-level performance.
Oh, and one last thing about how to find parameters of the model?
- Each Layer may or may not have parameters
- CONV/FC do
- RELU/POOL/DROPOUT don’t
- Each Layer may or may not have additional hyperparameters
- CONV/FC/POOL/DROPOUT do
- RELU doesn’t
Consider an example of model which we will implement below:
| Layers | Input Shape | Output Shape | Memory | Weights |
|---|---|---|---|---|
| INPUT | (28 x 28 x 1) | (28 x 28 x 1) | 28 * 28 * 1 = 784 | 0 |
| CONV(3x3, 32, stride=1, padding=0) | (28 x 28 x 1) | (26 x 26 x 32) | 26 * 26 * 32 = 21632 | (3 * 3 * 1) * 32 = 288 |
| CONV(3x3, 64, stride=1, padding=0) | (26 x 26 x 32) | (24 x 24 x 64) | 24 * 24* 64 = 36864 | (3 * 3 * 32) * 64 = 18342 |
| POOL(2x2) | (24 x 24 x 64) | (12 x 12 x 64) | 12 *12 * 64 = 9216 | 0 |
| DROPOUT() | (12 x 12 x 64) | (12 x 12 x 64) | 12 * 12 * 64 = 9216 | 0 |
| FLATTEN() | (12 x 12 x 64) | (9216) | 9216 | 0 |
| DENSE(128) | (9216) | (128) | 128 | 9216 * 128 = 1179648 |
| DROPOUT() | (128) | (128) | 128 | 0 |
| DENSE(num_classes=10) | (128) | (10) | 10 | 128 * 10 = 1280 |
| – | – | Total | 87194 | 1199558 |
Total Memory ~= 87K * 4 bytes ~= 0.3MB / image (only forward ~ *2 backward pass)
Total Parameters = 1199558 ~= 1.2M parameters (without biases)
Recap
- We looked into what is CNN and what are convolution operators and different operators
- How convolution operator performs on 3d image and its output
- What are kernels, padding and strides in convolution filters and the formula to calculate output dimension of any layer
- Different layers in ConvNet i.e. ReLu, Pool (Maxpooling, AveragePooling), FC (fully connected or dense layers)
- Typical architecture of ConvNets
- Background story related to field of deep learning
- Different amazing architectures that took part in Imagenet competition
- How to calculate number of parameters and size of model in CNN
Keras
Keras Sequential API
# [0-9] unique labels
batch_size = 256
num_classes = 10
epochs = 5
# input image dimensions
img_rows, img_cols = 28, 28
train_x = train_x.reshape(train_x.shape[0], img_rows, img_cols, 1)
val_x = val_x.reshape(val_x.shape[0], img_rows, img_cols, 1)
test_x = test_x.reshape(test_x.shape[0], img_rows, img_cols, 1)
print ('Training data shape', train_x.shape)
Training data shape (60000, 28, 28, 1)
# convert class vectors to binary class matrices
train_y = keras.utils.to_categorical(train_y, num_classes)
val_y = keras.utils.to_categorical(val_y, num_classes)
test_y = keras.utils.to_categorical(test_y, num_classes)
print ('Training labels shape:', train_y.shape)
Training labels shape: (60000, 10)
input_shape = (img_rows, img_cols, 1)
model = Sequential()
model.add(Conv2D(32, kernel_size=(3, 3),
activation='relu',
input_shape=input_shape)) # Input --> (28x28x1) Output --> (26x26x32)
model.add(Conv2D(64, (3, 3), activation='relu')) # Input --> (26x26x32) Output --> (24x24x64)
model.add(MaxPooling2D(pool_size=(2, 2))) # Input --> (24x24x64) Output --> (12x12x64)
model.add(Dropout(0.25)) # Input --> (12x12x64) Output --> (12x12x64)
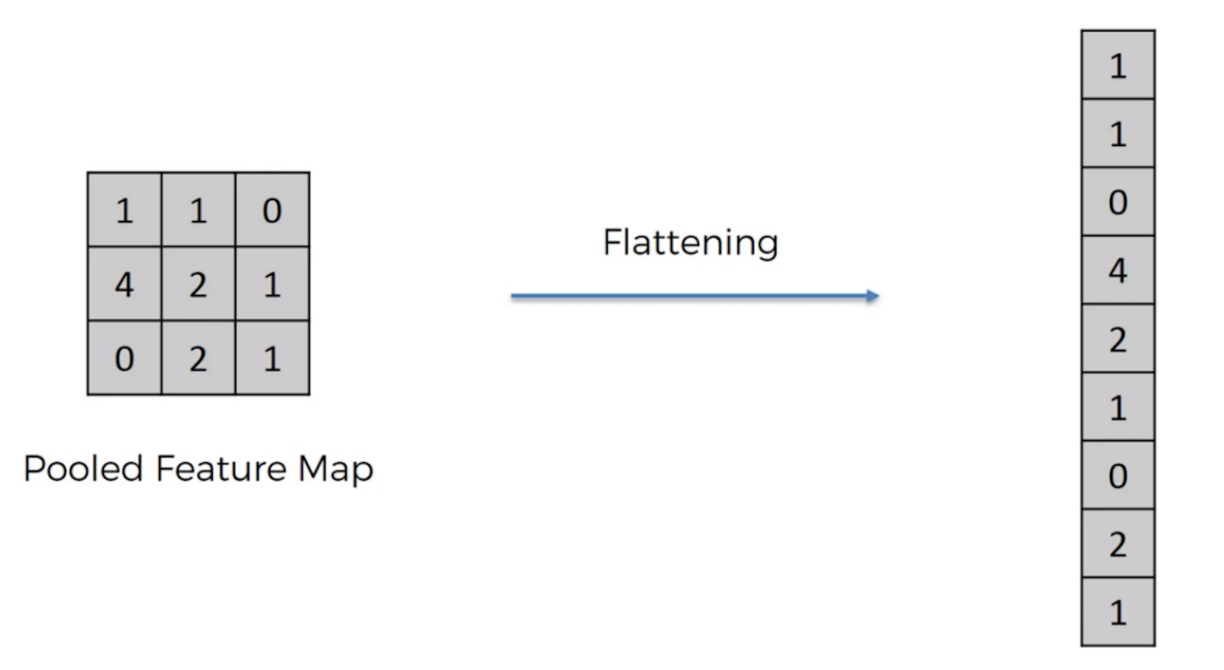
model.add(Flatten()) # Input --> (12x12x64) Output --> (9216)
model.add(Dense(128, activation='relu')) # Input --> (9216) Output --> (128)
model.add(Dropout(0.5)) # Input --> (128) Output --> (128)
model.add(Dense(num_classes, activation='softmax')) # Input --> (128) Output --> (10)
model.summary()
model.compile(loss='categorical_crossentropy',
optimizer='Adam',
metrics=['accuracy'])
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d_1 (Conv2D) (None, 26, 26, 32) 320
_________________________________________________________________
conv2d_2 (Conv2D) (None, 24, 24, 64) 18496
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (None, 12, 12, 64) 0
_________________________________________________________________
dropout_1 (Dropout) (None, 12, 12, 64) 0
_________________________________________________________________
flatten_1 (Flatten) (None, 9216) 0
_________________________________________________________________
dense_1 (Dense) (None, 128) 1179776
_________________________________________________________________
dropout_2 (Dropout) (None, 128) 0
_________________________________________________________________
dense_2 (Dense) (None, 10) 1290
=================================================================
Total params: 1,199,882
Trainable params: 1,199,882
Non-trainable params: 0
_________________________________________________________________
history = model.fit(train_x, train_y,
batch_size=batch_size,
epochs=epochs,
verbose=1,
validation_data=(val_x, val_y))
Train on 60000 samples, validate on 2000 samples
Epoch 1/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.4009 - acc: 0.8751 - val_loss: 0.0826 - val_acc: 0.9755
Epoch 2/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.1355 - acc: 0.9600 - val_loss: 0.0493 - val_acc: 0.9830
Epoch 3/5
60000/60000 [==============================] - 399s 7ms/step - loss: 0.0995 - acc: 0.9701 - val_loss: 0.0353 - val_acc: 0.9870
Epoch 4/5
60000/60000 [==============================] - 399s 7ms/step - loss: 0.0802 - acc: 0.9751 - val_loss: 0.0333 - val_acc: 0.9885
Epoch 5/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.0748 - acc: 0.9772 - val_loss: 0.0332 - val_acc: 0.9890
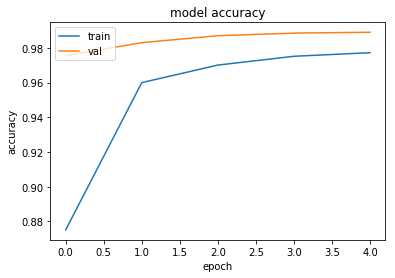
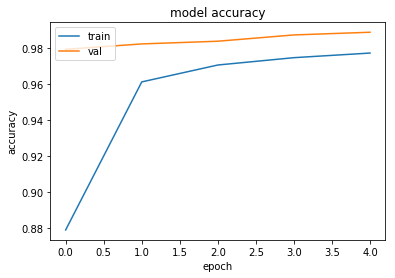
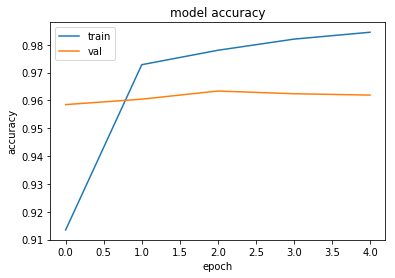
# summarize history for accuracy
plt.plot(history.history['acc'])
plt.plot(history.history['val_acc'])
plt.title('model accuracy')
plt.ylabel('accuracy')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
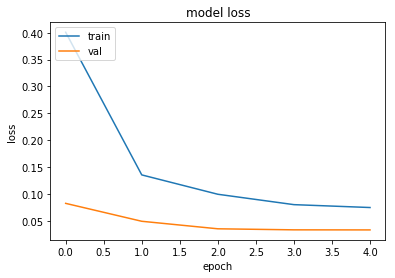
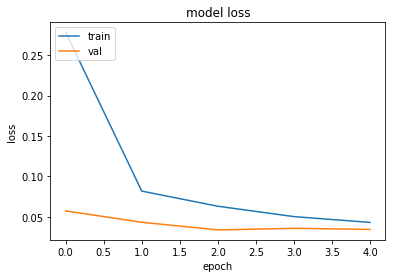
# summarize history for loss
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.title('model loss')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
score = model.evaluate(test_x, test_y, verbose=0)
print('Test loss:', score[0])
print('Test accuracy:', score[1])
Test loss: 0.0400921133792
Test accuracy: 0.987125
# obtain one batch of test images
images, labels = test_x[:32], test_y[:32]
# get sample outputs
predict = model.predict_on_batch(images)
# convert output probabilities to predicted class
preds = np.argmax(predict, axis=1)
labels = np.argmax(labels, axis=1)
# plot the images in the batch, along with predicted and true labels
fig = plt.figure(figsize=(25, 4))
for idx in np.arange(20):
ax = fig.add_subplot(2, 20/2, idx+1, xticks=[], yticks=[])
ax.imshow(images[idx].reshape((28, 28)), cmap='gray')
ax.set_title("{} ({})".format(str(preds[idx]), str(labels[idx])),
class=("green" if preds[idx]==labels[idx] else "red"))

Keras Functional API
# [0-9] unique labels
batch_size = 256
num_classes = 10
epochs = 5
# input image dimensions
img_rows, img_cols = 28, 28
input_shape = (img_rows, img_cols, 1)
inputs = Input(shape=input_shape) # Input --> (28x28x1) Output --> (28x28x1)
x = Conv2D(32, kernel_size=(3, 3),
activation='relu',
input_shape=input_shape)(inputs) # Input --> (28x28x1) Output --> (26x26x32)
x = Conv2D(64, (3, 3), activation='relu')(x) # Input --> (26x26x32) Output --> (24x24x64)
x = MaxPooling2D(pool_size=(2, 2))(x) # Input --> (24x24x64) Output --> (12x12x64)
x = Dropout(0.25)(x) # Input --> (24x24x64) Output --> (12x12x64)
x = Flatten()(x) # Input --> (12x12x64) Output --> (9216)
x = Dense(128, activation='relu')(x) # Input --> (9216) Output --> (128)
x = Dropout(0.5)(x) # Input --> (128) Output --> (128)
predictions = Dense(num_classes, activation='softmax')(x) # Input --> (128) Output --> (10)
model = Model(inputs=inputs, outputs=predictions)
model.compile(loss='categorical_crossentropy',
optimizer='Adam',
metrics=['accuracy'])
print (model.summary())
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
input_1 (InputLayer) (None, 28, 28, 1) 0
_________________________________________________________________
conv2d_3 (Conv2D) (None, 26, 26, 32) 320
_________________________________________________________________
conv2d_4 (Conv2D) (None, 24, 24, 64) 18496
_________________________________________________________________
max_pooling2d_2 (MaxPooling2 (None, 12, 12, 64) 0
_________________________________________________________________
dropout_3 (Dropout) (None, 12, 12, 64) 0
_________________________________________________________________
flatten_2 (Flatten) (None, 9216) 0
_________________________________________________________________
dense_3 (Dense) (None, 128) 1179776
_________________________________________________________________
dropout_4 (Dropout) (None, 128) 0
_________________________________________________________________
dense_4 (Dense) (None, 10) 1290
=================================================================
Total params: 1,199,882
Trainable params: 1,199,882
Non-trainable params: 0
_________________________________________________________________
None
history = model.fit(train_x, train_y,
batch_size=batch_size,
epochs=epochs,
verbose=1,
validation_data=(val_x, val_y))
Train on 60000 samples, validate on 2000 samples
Epoch 1/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.3889 - acc: 0.8790 - val_loss: 0.0720 - val_acc: 0.9795
Epoch 2/5
60000/60000 [==============================] - 398s 7ms/step - loss: 0.1323 - acc: 0.9614 - val_loss: 0.0518 - val_acc: 0.9825
Epoch 3/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.0990 - acc: 0.9708 - val_loss: 0.0426 - val_acc: 0.9840
Epoch 4/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.0855 - acc: 0.9749 - val_loss: 0.0331 - val_acc: 0.9875
Epoch 5/5
60000/60000 [==============================] - 400s 7ms/step - loss: 0.0730 - acc: 0.9774 - val_loss: 0.0324 - val_acc: 0.9890
# summarize history for accuracy
plt.plot(history.history['acc'])
plt.plot(history.history['val_acc'])
plt.title('model accuracy')
plt.ylabel('accuracy')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
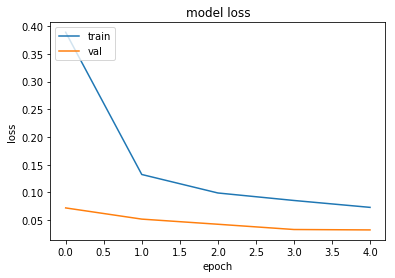
# summarize history for loss
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.title('model loss')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
score = model.evaluate(test_x, test_y, verbose=0)
print('Test loss:', score[0])
print('Test accuracy:', score[1])
Test loss: 0.0396651876811
Test accuracy: 0.98775
# obtain one batch of test images
images, labels = test_x[:32], test_y[:32]
# get sample outputs
predict = model.predict_on_batch(images)
# convert output probabilities to predicted class
preds = np.argmax(predict, axis=1)
labels = np.argmax(labels, axis=1)
# plot the images in the batch, along with predicted and true labels
fig = plt.figure(figsize=(25, 4))
for idx in np.arange(20):
ax = fig.add_subplot(2, 20/2, idx+1, xticks=[], yticks=[])
ax.imshow(images[idx].reshape((28, 28)), cmap='gray')
ax.set_title("{} ({})".format(str(preds[idx]), str(labels[idx])),
class=("green" if preds[idx]==labels[idx] else "red"))

PyTorch
# load all the required libraries
import copy
import time
import numpy as np # package for computing
from sklearn.model_selection import train_test_split # split dataset
import torch # import keras with tensorflow as backend
from torchvision import datasets # import mnist dataset from keras
from torchvision import transforms # sequential and functional api keras
from torch.utils.data.sampler import SubsetRandomSampler
import torch.nn as nn
import torch.nn.functional as F
from torch import optim
import matplotlib.pyplot as plt # matplotlib library for plotting
# display plots inline (in notebook itself)
%matplotlib inline
# Detect if we have a GPU available
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print('Training on %s ...'%format(device))
Training on cpu ...
# load mnist data
batch_size = 256
num_workers = 0
val_size = 0.2
transform = transforms.Compose([transforms.ToTensor()])
# choose the training and test datasets
train_data = datasets.MNIST('data', train=True,
download=True, transform=transform)
test_data = datasets.MNIST('data', train=False,
download=True, transform=transform)
# obtain training indices that will be used for validation
num_test = len(test_data)
indices = list(range(num_test))
np.random.shuffle(indices)
split = int(np.floor(val_size * num_test))
test_idx, val_idx = indices[split:], indices[:split]
# define samplers for obtaining training and validation batches
test_sampler = SubsetRandomSampler(test_idx)
valid_sampler = SubsetRandomSampler(val_idx)
# prepare data loaders (combine dataset and sampler)
train_loader = torch.utils.data.DataLoader(train_data, batch_size=batch_size,
num_workers=num_workers)
val_loader = torch.utils.data.DataLoader(test_data, batch_size=batch_size,
sampler=valid_sampler, num_workers=num_workers)
test_loader = torch.utils.data.DataLoader(test_data, batch_size=batch_size,
sampler=test_sampler, num_workers=num_workers)
print('Training samples:', len(train_loader.dataset))
print ('Validation samples:', len(val_loader.dataset))
print('Test samples:', len(test_loader.dataset))
# Create training and validation dataloaders
dataloaders_dict = {'train': train_loader,
'val': val_loader}
Training samples: 60000
Validation samples: 10000
Test samples: 10000
Visualization of data
Enough talk, show me the data!
# helper function to un-normalize and display an image
def imshow(img):
img = img / 2 + 0.5 # unnormalize
plt.imshow(np.squeeze(np.transpose(img, (1, 2, 0))), cmap='gray') # convert from Tensor image
dataiter = iter(train_loader)
images, labels = dataiter.next()
images = images.numpy()
# plot the images in the batch, along with the corresponding labels
fig = plt.figure(figsize=(25, 4))
#display 20 images
for idx in np.arange(20):
ax = fig.add_subplot(2, 20/2, idx+1, xticks=[], yticks=[])
imshow(images[idx])
# print out the correct label for each image
ax.set_title(str(labels[idx]))

img = np.squeeze(images[0])
fig = plt.figure(figsize = (12,12))
ax = fig.add_subplot(111)
ax.imshow(img, cmap='gray')
width, height = img.shape
thresh = img.max()/2.5
for x in range(width):
for y in range(height):
val = round(img[x][y],2) if img[x][y] !=0 else 0
ax.annotate(str(val), xy=(y,x),
horizontalalignment='center',
verticalalignment='center',
class='white' if img[x][y]<thresh else 'black')
PyTorch Sequential API
# [0-9] unique labels
num_classes = 10
epochs = 5
class Flatten(nn.Module):
def __init__(self):
super(Flatten, self).__init__()
def forward(self, x):
x = x.view(x.size(0), -1)
return x
## Define the NN architecture
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
D_in = 784
H = 16
D_out = num_classes
self.classifier = torch.nn.Sequential(
nn.Conv2d(1, 32, 3, padding=0),
nn.ReLU(),
nn.Conv2d(32, 64, 3, padding=0),
nn.ReLU(),
nn.MaxPool2d(2, 2),
nn.Dropout(p=0.25),
Flatten(),
nn.Linear(12*12*64, 128),
nn.Dropout(p=0.5),
nn.Linear(128, num_classes),
nn.LogSoftmax(dim=1)
)
def forward(self, x):
# 2 conv layer, with relu activation function
x = self.classifier(x)
return x
# initialize the NN
model = Net()
model = model.to(device)
print(model)
Net(
(classifier): Sequential(
(0): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(1): ReLU()
(2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Dropout(p=0.25)
(6): Flatten()
(7): Linear(in_features=9216, out_features=128, bias=True)
(8): Dropout(p=0.5)
(9): Linear(in_features=128, out_features=10, bias=True)
(10): LogSoftmax()
)
)
# specify loss function
criterion = nn.NLLLoss()
# specify optimizer
optimizer = optim.Adam(model.parameters(), lr=1e-3)
def train_model(model, dataloaders, criterion, optimizer, num_epochs):
since = time.time()
history = dict()
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
running_corrects = 0
# Iterate over data.
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
# zero the parameter gradients
optimizer.zero_grad()
# forward
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
# Get model outputs and calculate loss
# backward + optimize only if in training phase
if phase == 'train':
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
else:
outputs = model(inputs)
loss = criterion(outputs, labels)
_, preds = torch.max(outputs, 1)
# statistics
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / (len(dataloaders[phase])*batch_size)
epoch_acc = running_corrects.double() / (len(dataloaders[phase])*batch_size)
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
print (len(dataloaders[phase].dataset))
# deep copy the model
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
if phase+'_acc' in history:
# append the new number to the existing array at this slot
history[phase+'_acc'].append(epoch_acc)
else:
# create a new array in this slot
history[phase+'_acc'] = [epoch_acc]
if phase+'_loss' in history:
# append the new number to the existing array at this slot
history[phase+'_loss'].append(epoch_loss)
else:
# create a new array in this slot
history[phase+'_loss'] = [epoch_loss]
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# load best model weights
model.load_state_dict(best_model_wts)
return model, history
model, history = train_model(model, dataloaders_dict, criterion, optimizer, epochs)
Epoch 0/4
----------
train Loss: 0.2784 Acc: 0.9134
60000
val Loss: 0.0574 Acc: 0.9585
10000
Epoch 1/4
----------
train Loss: 0.0819 Acc: 0.9728
60000
val Loss: 0.0433 Acc: 0.9604
10000
Epoch 2/4
----------
train Loss: 0.0632 Acc: 0.9780
60000
val Loss: 0.0339 Acc: 0.9634
10000
Epoch 3/4
----------
train Loss: 0.0503 Acc: 0.9820
60000
val Loss: 0.0359 Acc: 0.9624
10000
Epoch 4/4
----------
train Loss: 0.0432 Acc: 0.9845
60000
val Loss: 0.0345 Acc: 0.9619
10000
Training complete in 25m 44s
Best val Acc: 0.963379
# summarize history for accuracy
plt.plot(history['train_acc'])
plt.plot(history['val_acc'])
plt.title('model accuracy')
plt.ylabel('accuracy')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
# summarize history for loss
plt.plot(history['train_loss'])
plt.plot(history['val_loss'])
plt.title('model loss')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
# initialize lists to monitor test loss and accuracy
test_loss = 0.0
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
model.eval() # prep model for *evaluation*
for data, target in test_loader:
# forward pass: compute predicted outputs by passing inputs to the model
output = model(data)
# calculate the loss
loss = criterion(output, target)
# update test loss
test_loss += loss.item()*data.size(0)
# convert output probabilities to predicted class
_, pred = torch.max(output, 1)
# compare predictions to true label
correct = np.squeeze(pred.eq(target.data.view_as(pred)))
# calculate test accuracy for each object class
for i in range(len(data)):
label = target.data[i]
class_correct[label] += correct[i].item()
class_total[label] += 1
# calculate and print avg test loss
test_loss = test_loss/len(test_loader.dataset)
print('Test Loss: {:.6f}\n'.format(test_loss))
for i in range(10):
if class_total[i] > 0:
print('Test Accuracy of %5s: %2d%% (%2d/%2d)' % (
str(i), 100 * class_correct[i] / class_total[i],
np.sum(class_correct[i]), np.sum(class_total[i])))
else:
print('Test Accuracy of %5s: N/A (no training examples)' % (classes[i]))
print('\nTest Accuracy (Overall): %2d%% (%2d/%2d)' % (
100. * np.sum(class_correct) / np.sum(class_total),
np.sum(class_correct), np.sum(class_total)))
Test Loss: 0.033183
Test Accuracy of 0: 99% (787/790)
Test Accuracy of 1: 99% (921/926)
Test Accuracy of 2: 99% (803/808)
Test Accuracy of 3: 98% (808/820)
Test Accuracy of 4: 99% (767/774)
Test Accuracy of 5: 98% (706/714)
Test Accuracy of 6: 98% (744/754)
Test Accuracy of 7: 97% (797/816)
Test Accuracy of 8: 98% (772/784)
Test Accuracy of 9: 97% (793/814)
Test Accuracy (Overall): 98% (7898/8000)
# obtain one batch of test images
dataiter = iter(test_loader)
images, labels = dataiter.next()
# get sample outputs
output = model(images)
# convert output probabilities to predicted class
_, preds = torch.max(output, 1)
# prep images for display
images = images.numpy()
# plot the images in the batch, along with predicted and true labels
fig = plt.figure(figsize=(25, 4))
for idx in np.arange(20):
ax = fig.add_subplot(2, 20/2, idx+1, xticks=[], yticks=[])
ax.imshow(np.squeeze(images[idx]), cmap='gray')
ax.set_title("{} ({})".format(str(preds[idx].item()), str(labels[idx].item())),
class=("green" if preds[idx]==labels[idx] else "red"))

PyTorch Functional API
# [0-9] unique labels
num_classes = 10
epochs = 5
import torch.nn as nn
import torch.nn.functional as F
# define the CNN architecture
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# convolutional layer
self.conv1 = nn.Conv2d(1, 32, 3, padding=0)
self.conv2 = nn.Conv2d(32, 64, 3, padding=0)
# max pooling layer
self.pool = nn.MaxPool2d(2, 2)
self.dropout1 = nn.Dropout(p=0.25)
self.dropout2 = nn.Dropout(p=0.5)
self.fc1 = nn.Linear(12 * 12 * 64, 128)
self.output = nn.Linear(128, num_classes)
def forward(self, x):
# add sequence of convolutional and max pooling layers
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = self.pool(x)
x = self.dropout1(x)
x = x.view(-1, 12 * 12 * 64)
x = F.relu(self.fc1(x))
x = self.dropout2(x)
x = F.log_softmax(self.output(x), dim=1)
return x
# create a complete CNN
model = Net()
model = model.to(device)
print(model)
Net(
(conv1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(conv2): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1))
(pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(dropout1): Dropout(p=0.25)
(dropout2): Dropout(p=0.5)
(fc1): Linear(in_features=9216, out_features=128, bias=True)
(output): Linear(in_features=128, out_features=10, bias=True)
)
# specify loss function
criterion = nn.NLLLoss()
# specify optimizer
optimizer = optim.Adam(model.parameters(), lr=1e-3)
def train_model(model, dataloaders, criterion, optimizer, num_epochs):
since = time.time()
history = dict()
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
running_corrects = 0
# Iterate over data.
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
# zero the parameter gradients
optimizer.zero_grad()
# forward
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
# Get model outputs and calculate loss
# backward + optimize only if in training phase
if phase == 'train':
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
else:
outputs = model(inputs)
loss = criterion(outputs, labels)
_, preds = torch.max(outputs, 1)
# statistics
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / (len(dataloaders[phase])*batch_size)
epoch_acc = running_corrects.double() / (len(dataloaders[phase])*batch_size)
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
print (len(dataloaders[phase].dataset))
# deep copy the model
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
if phase+'_acc' in history:
# append the new number to the existing array at this slot
history[phase+'_acc'].append(epoch_acc)
else:
# create a new array in this slot
history[phase+'_acc'] = [epoch_acc]
if phase+'_loss' in history:
# append the new number to the existing array at this slot
history[phase+'_loss'].append(epoch_loss)
else:
# create a new array in this slot
history[phase+'_loss'] = [epoch_loss]
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# load best model weights
model.load_state_dict(best_model_wts)
return model, history
model, history = train_model(model, dataloaders_dict, criterion, optimizer, epochs)
Epoch 0/4
----------
train Loss: 0.3591 Acc: 0.8874
60000
val Loss: 0.0627 Acc: 0.9570
10000
Epoch 1/4
----------
train Loss: 0.1097 Acc: 0.9648
60000
val Loss: 0.0405 Acc: 0.9653
10000
Epoch 2/4
----------
train Loss: 0.0784 Acc: 0.9739
60000
val Loss: 0.0335 Acc: 0.9678
10000
Epoch 3/4
----------
train Loss: 0.0649 Acc: 0.9777
60000
val Loss: 0.0272 Acc: 0.9692
10000
Epoch 4/4
----------
train Loss: 0.0551 Acc: 0.9801
60000
val Loss: 0.0306 Acc: 0.9678
10000
Training complete in 25m 56s
Best val Acc: 0.969238
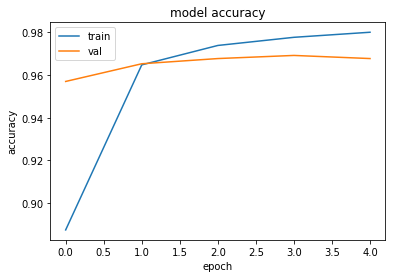
# summarize history for accuracy
plt.plot(history['train_acc'])
plt.plot(history['val_acc'])
plt.title('model accuracy')
plt.ylabel('accuracy')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
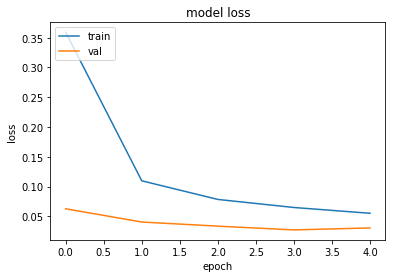
# summarize history for loss
plt.plot(history['train_loss'])
plt.plot(history['val_loss'])
plt.title('model loss')
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train', 'val'], loc='upper left')
plt.show()
# initialize lists to monitor test loss and accuracy
test_loss = 0.0
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
model.eval() # prep model for *evaluation*
for data, target in test_loader:
# forward pass: compute predicted outputs by passing inputs to the model
output = model(data)
# calculate the loss
loss = criterion(output, target)
# update test loss
test_loss += loss.item()*data.size(0)
# convert output probabilities to predicted class
_, pred = torch.max(output, 1)
# compare predictions to true label
correct = np.squeeze(pred.eq(target.data.view_as(pred)))
# calculate test accuracy for each object class
for i in range(len(data)):
label = target.data[i]
class_correct[label] += correct[i].item()
class_total[label] += 1
# calculate and print avg test loss
test_loss = test_loss/len(test_loader.dataset)
print('Test Loss: {:.6f}\n'.format(test_loss))
for i in range(10):
if class_total[i] > 0:
print('Test Accuracy of %5s: %2d%% (%2d/%2d)' % (
str(i), 100 * class_correct[i] / class_total[i],
np.sum(class_correct[i]), np.sum(class_total[i])))
else:
print('Test Accuracy of %5s: N/A (no training examples)' % (classes[i]))
print('\nTest Accuracy (Overall): %2d%% (%2d/%2d)' % (
100. * np.sum(class_correct) / np.sum(class_total),
np.sum(class_correct), np.sum(class_total)))
Test Loss: 0.028171
Test Accuracy of 0: 99% (788/790)
Test Accuracy of 1: 99% (923/926)
Test Accuracy of 2: 99% (802/808)
Test Accuracy of 3: 98% (805/820)
Test Accuracy of 4: 99% (769/774)
Test Accuracy of 5: 99% (709/714)
Test Accuracy of 6: 98% (742/754)
Test Accuracy of 7: 98% (804/816)
Test Accuracy of 8: 98% (772/784)
Test Accuracy of 9: 97% (790/814)
Test Accuracy (Overall): 98% (7904/8000)
# obtain one batch of test images
dataiter = iter(test_loader)
images, labels = dataiter.next()
# get sample outputs
output = model(images)
# convert output probabilities to predicted class
_, preds = torch.max(output, 1)
# prep images for display
images = images.numpy()
# plot the images in the batch, along with predicted and true labels
fig = plt.figure(figsize=(25, 4))
for idx in np.arange(20):
ax = fig.add_subplot(2, 20/2, idx+1, xticks=[], yticks=[])
ax.imshow(np.squeeze(images[idx]), cmap='gray')
ax.set_title("{} ({})".format(str(preds[idx].item()), str(labels[idx].item())),
class=("green" if preds[idx]==labels[idx] else "red"))

I-know-everything: Young Padwan, now you have the same power as me to train an CNN. Now knock yourself and experiement with different number of layers. Also, try to experiement with different architectures and observe the overfitting and underfitting. In next post, we will go over the Power of Transfer Learning and Power to Visualize CNN. Master Karpathy says, “If you’re feeling a bit of a fatigue in thinking about the architectural decisions, you’ll be pleased to know that in 90% or more of applications you should not have to worry about these. I like to summarize this point as “don’t be a hero”: Instead of rolling your own architecture for a problem, you should look at whatever architecture currently works best on ImageNet, download a pretrained model and finetune it on your data. You should rarely ever have to train a ConvNet from scratch or design one from scratch.” So, we don’t need be on Googlion to train powerful CNNs, we can do it on our planet too!
I-know-nothing: Thank you Master.
Happy Learning!
Note: Caveats on terminology
Googlion - Google
Force of CNN - CNN
Power of Transfer Learning - Transfer Learning
neuron - unit
jar jar backpropagation - backpropagation
Power of Visualize CNN - Visualize CNN
non-linearity - activity function
(linear transform + non-linearity) - layer
ConvNets - Convolution Neural Networks
Further Reading
CS231n Winter 2016 Lectures 7 and 8
Chris Olah’s blog Understanding Convolutions
ConvNets: A Modular Perspective
Yearning book by Andrew Ng Chapters 4 to 7
Very Cool Explaination by Ars Technica
CS231n: Convolutional Neural Networks
Adam Geitgey’s Machine Learning is Fun! Part 3 and Part 4
A Comprehensive Survey on Deep Learning Approaches
Training CNN in your browser ConvNetJS Demos
How Batch Normalization Helps?
Footnotes and Credits
Taj Mahal and all matrix and transformed image
All architectures LeNet, AlexNet, etc
{kind=link}
Imagenet architecture graphics
{kind=link}
NOTE
Questions, comments, other feedback? E-mail the author